Eğitimler
Genuino101CurieIMUAccelerometerOrientation
Bu öğretici ile ivmeölçer okumalarını bir yöne dönüştürürsünüz. Daha sonra yönlendirme, seri monitöre işlemcinin, USB konektörünün ve pimlerin referans olarak konumunu bildiren bir metin olarak yazdırılır.
Gerekli Donanım
Devre
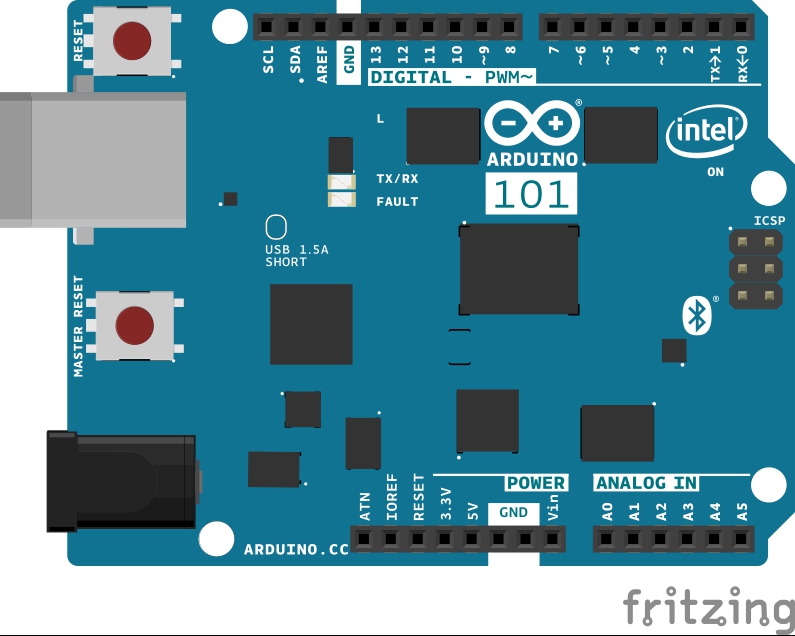
Bu öğreticiyi kullanmak için ek donanıma gerek yoktur.
Yazılım Temelleri
Kütüphaneler
CurieIMU .h, 101 anakartın IMU yongasının tüm parametrelerine, özelliklerine ve okumalarına erişim sağlayan kütüphanedir. Bu ünite üç eksenli ivmeölçer ve üç eksenli jiroskop içerir. Bu kütüphane, 101 kart çekirdeğinin bir parçasıdır ve Arduino veya Genuino 101 için çekirdek dosyalarla birlikte yüklenir. Bu öğreticide ham ivmeölçer değerlerini okuyoruz.
Fonksiyonlar
Yok
Kod
Tahtanın yönü üç eksenin yönü kullanılarak hesaplanır. Z ekseni pcb'den geçer: bileşen tarafı yukarı doğru pozitif, aşağıya doğru negatif. X ekseni pozitifse USB konektöründen Bluetooth antenine giderken, Y ekseni pozitif olduğunda analog ve güç pinlerinden dijital pinlere gider. Üç eksen işaretini kullanarak çizim, tüm tahtanın yönünü hesaplar.
* Copyright (c) 2016 Intel Corporation. All rights reserved.
* See the bottom of this file for the license terms.
*/
/*
This sketch example demonstrates how the BMI160 on the
Intel(R) Curie(TM) module can be used to read accelerometer data
and translate it to an orientation
*/
#include "CurieIMU.h"
int lastOrientation = - 1; // previous orientation (for comparison)
void setup() {
Serial.begin(9600); // initialize Serial communication
while (!Serial); // wait for the serial port to open
// initialize device
Serial.println("Initializing IMU device...");
CurieIMU.begin();
// Set the accelerometer range to 2G
CurieIMU.setAccelerometerRange(2);
}
void loop() {
int orientation = - 1; // the board's orientation
String orientationString; // string for printing description of orientation
/*
The orientations of the board:
0: flat, processor facing up
1: flat, processor facing down
2: landscape, analog pins down
3: landscape, analog pins up
4: portrait, USB connector up
5: portrait, USB connector down
*/
// read accelerometer:
int x = CurieIMU.readAccelerometer(X_AXIS);
int y = CurieIMU.readAccelerometer(Y_AXIS);
int z = CurieIMU.readAccelerometer(Z_AXIS);
// calculate the absolute values, to determine the largest
int absX = abs(x);
int absY = abs(y);
int absZ = abs(z);
if ( (absZ > absX) && (absZ > absY)) {
// base orientation on Z
if (z > 0) {
orientationString = "up";
orientation = 0;
} else {
orientationString = "down";
orientation = 1;
}
} else if ( (absY > absX) && (absY > absZ)) {
// base orientation on Y
if (y > 0) {
orientationString = "digital pins up";
orientation = 2;
} else {
orientationString = "analog pins up";
orientation = 3;
}
} else {
// base orientation on X
if (x < 0) {
orientationString = "connector up";
orientation = 4;
} else {
orientationString = "connector down";
orientation = 5;
}
}
// if the orientation has changed, print out a description:
if (orientation != lastOrientation) {
Serial.println(orientationString);
lastOrientation = orientation;
}
}
/*
Copyright (c) 2016 Intel Corporation. All rights reserved.
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA
*/